Contact Us
Contact Us
Read More
10 results found
Featured
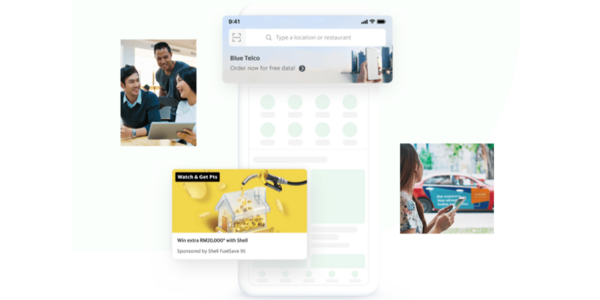
How Grab Built a Scalable, High-Performance Ad Server
Featured
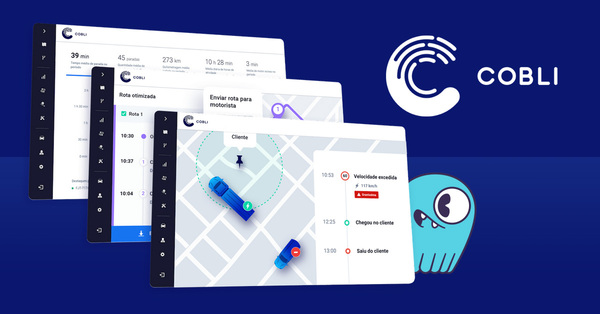
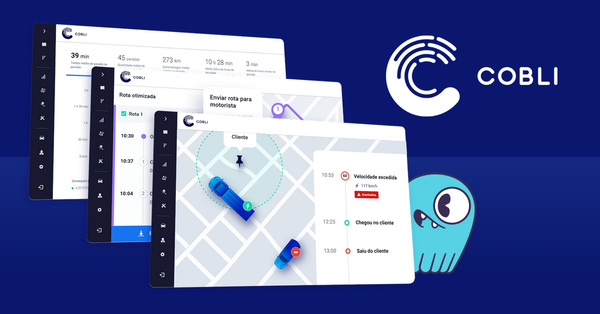
Cobli’s Journey from Cassandra to ScyllaDB: Dissecting a Real-Life Migration Process
Featured
ScyllaDB Simplifies Fraud Detection at Grab, SE Asia's Largest Startup
Featured
Nauto: Achieving Consistency in an Eventually Consistent Environment
Featured
Cobli’s Drive From Cassandra to ScyllaDB Cloud
Featured
Nauto Uses ScyllaDB as a DB Layer for ML Algorithms
Featured
Nauto on Consistently Merging Time Series and Finding Similar Images
Featured
Nauto: An Online Method for Merging Time Ranges on Top of ScyllaDB
Featured
Grab at Scale with ScyllaDB
Featured
Real Time Intelligent Decision Making Using ScyllaDB - Ola Cabs' Journey
Featured